
Обычный трёп. Флудим здесь :)
![]() rb338 » Ср июл 13, 2016 1:09 pm
rb338 » Ср июл 13, 2016 1:09 pm
MazdaVOD писал(а):Кто-то купил квадрокоптер или намотал скотчем камеру к голубю
Не скотчем, а изолентой!


Найти меня проще всего на D2: https://www.drive2.ru/r/mazda/323/455230250566025378/
-

rb338 - Сообщения: 4773
- Зарегистрирован: Вс июл 04, 2010 12:00 am
- Откуда: Санкт-Петербург
![]() rb338 » Ср июл 13, 2016 6:52 pm
rb338 » Ср июл 13, 2016 6:52 pm
Aerolab писал(а):ууу!! Кайфная штука! Поздравляю с летательным аппаратом)) у вас мальчик.
я тоже такую хочу... и шлем доп.Реальности чтоб полетать так полетать))
сам собирал, или кит?
Так ежели кит - то тоже собирать самому, разве нет?)
Комплектом я тут брал только моторы+ регуляторы.
Всё остальное - россыпью)
Пока бодаюсь с настройкой.
ФПВ будет позже)
Весьма не просто всё) Да и управлять этой штукой тоже непросто)
Буду менять полётный контроллер, сейчас cc3d, хочу поставить apm - коробочка посолидней, барометры, жипиэсы, туда-сюда)
Найти меня проще всего на D2: https://www.drive2.ru/r/mazda/323/455230250566025378/
-
rb338 - Сообщения: 4773
- Зарегистрирован: Вс июл 04, 2010 12:00 am
- Откуда: Санкт-Петербург
![]() Aerolab » Ср июл 13, 2016 9:58 pm
Aerolab » Ср июл 13, 2016 9:58 pm
Нуу...может сам с нуля софт писал...или вместо коробки взял процессор, и купил в него прошивку...я например хочу сам обуздать все трудности с которыми сталкивались разработчики софта для полетных компьютеров. До вот времени уйдет на это уйма...
Но если упереться, то можно и софт уровня dji реализовать)) а это совсем не дурно))
А так)) акума тебе пободрее, да крашей поменьше))
Но если упереться, то можно и софт уровня dji реализовать)) а это совсем не дурно))
А так)) акума тебе пободрее, да крашей поменьше))
- Aerolab
- Сообщения: 242
- Зарегистрирован: Чт фев 20, 2014 1:00 am
- Откуда: Воронеж
![]() rb338 » Чт июл 14, 2016 2:51 pm
rb338 » Чт июл 14, 2016 2:51 pm
Aerolab писал(а):Нуу...может сам с нуля софт писал...или вместо коробки взял процессор, и купил в него прошивку...я например хочу сам обуздать все трудности с которыми сталкивались разработчики софта для полетных компьютеров. До вот времени уйдет на это уйма...
Но если упереться, то можно и софт уровня dji реализовать)) а это совсем не дурно))
А так)) акума тебе пободрее, да крашей поменьше))
Не-не, самому софт с нуля писать бессмысленно, при наличии туевой хучи готовых и отлаженных решений)
Там на самом деле, с точки зрения софта всё не так просто.
Там всякие пропорционально-интегрально-дифференциальные регуляторы)
Сейчас у меня контроллер cc3d, который заточен под маленькие гоночные квадрики.
Не самый лучший выбор в моём случае)
У него нет стабилизации по высоте, нет функций GPS
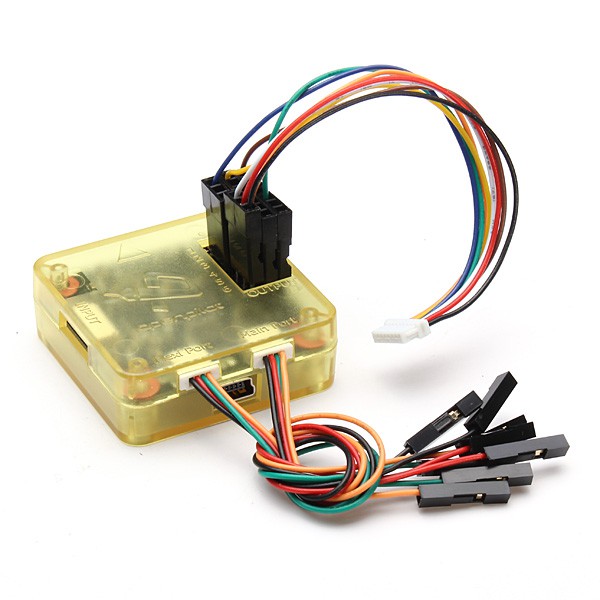
Зато он дешёвый)
Заказал уже посерьёзней коробочку, такую:

А контроллеры от DJI стоят космос, закрытые прошивки, и по отзывам - далеко не безглючные)
Найти меня проще всего на D2: https://www.drive2.ru/r/mazda/323/455230250566025378/
-
rb338 - Сообщения: 4773
- Зарегистрирован: Вс июл 04, 2010 12:00 am
- Откуда: Санкт-Петербург
![]() Aerolab » Чт июл 14, 2016 4:00 pm
Aerolab » Чт июл 14, 2016 4:00 pm
по DJI: если отдельно контроллеры то само-собой.. ибо они делаются под универсальную перефирию, чтоб максимум рынка перекрыть.
а если готовые коптеры, то вообще без багов летается))
единственное что они сейчас без полётные зоны внедрили(( а у меня дом находится рядом с аэродромом..(
дома не полетать( да и дорого...124 тысячи за 4-й фантом, реально лучше кузов маськи превратить в идеал за такие деньги((
писать с нуля имеет смысл в том случае если охото потом что-то своё в это вкрутить..
да и проблемы разработки в основном сводятся к управлению питанием контроллеров маторов. и дриблинги у всех датчиков...
другое дело-стоят контроллеры не баснословно дорого... хотя и кусается цена((
а если готовые коптеры, то вообще без багов летается))
единственное что они сейчас без полётные зоны внедрили(( а у меня дом находится рядом с аэродромом..(
дома не полетать( да и дорого...124 тысячи за 4-й фантом, реально лучше кузов маськи превратить в идеал за такие деньги((
писать с нуля имеет смысл в том случае если охото потом что-то своё в это вкрутить..
да и проблемы разработки в основном сводятся к управлению питанием контроллеров маторов. и дриблинги у всех датчиков...
другое дело-стоят контроллеры не баснословно дорого... хотя и кусается цена((
- Код: Выделить всё
OFF_Top: это тоже самое что и ЭБУ в машине... есть готовые.. есть готовые кастомные (ВЕМС, APEXI, HallTeck) и прочее...
но они ж не умеют реализовывать мои задумки, они используют типичные "бест практикс" алгоритмы, и не шага влево/вправо.
я бы например наполнял цилиндр не по времени открытия форсунки, а по давлению топлива в рампе, ибо я думаю что для равномерного заполнения форсунка должна открываться на тоже время что и открывается клапан - 15~20% а количество топлива регулировать давлением.
ну это идея у меня такая.. пока иду в эту сторону. но вреемя... много времени...ооочень много времени.)) за последний год я только контроллер коробки смог сделать(а это в 100500 раз проще сделать) для бубару(
понесло астапа в общем:twisted:
- Aerolab
- Сообщения: 242
- Зарегистрирован: Чт фев 20, 2014 1:00 am
- Откуда: Воронеж
![]() rb338 » Чт июл 14, 2016 4:56 pm
rb338 » Чт июл 14, 2016 4:56 pm
Aerolab писал(а):да и проблемы разработки в основном сводятся к управлению питанием контроллеров маторов. и дриблинги у всех датчиков...
А вот и нет)
Что там сложного - сформировать сигнал на регулятор мотора?)
И питанием их управлять то, по сути и не надо - на регуляторы подаётся прямое постоянное напряжение с аккума.
Мозги в этом не участвуют.
А вот вычислить, какой именно нужно сформировать сигнал, чтобы коптер адекватно держал горизонт и управлялся внешними сигналами - вот это уже целая наука.
Там не всё так просто - видишь по гироскопу крен, повышаешь обороты моторов.
Нет)
Найти меня проще всего на D2: https://www.drive2.ru/r/mazda/323/455230250566025378/
-
rb338 - Сообщения: 4773
- Зарегистрирован: Вс июл 04, 2010 12:00 am
- Откуда: Санкт-Петербург
![]() Aerolab » Чт июл 14, 2016 5:59 pm
Aerolab » Чт июл 14, 2016 5:59 pm
ну так в том и смысл что нужно составлять математическую модель того или иного поведения... например по гироскопу и компасу-для статичного поведения леталки, а потом там: тоже уйма алгоритмов, например гироскопом не отличить снос ветром от небольшого наклона(без разворота по вертикальной оси)...из этой ситуации можно выйти добавив ещё один гироскоп и опрашивая его по другому алгоритму.
короче это интересно
а по поводу питания контроллеров не верно выразился...протокол коммутации с ними один.. управлять можно по разному, нужно математическую модель строить и заложить её в проц))
а так-я даже на Raspberry Pi видел контроллеры полётов. но мне кажется эта штука параллельно может ещё и небольшой Web-хостинг держать у себя на борту.. для домашней сети))
короче это интересно
а по поводу питания контроллеров не верно выразился...протокол коммутации с ними один.. управлять можно по разному, нужно математическую модель строить и заложить её в проц))
а так-я даже на Raspberry Pi видел контроллеры полётов. но мне кажется эта штука параллельно может ещё и небольшой Web-хостинг держать у себя на борту.. для домашней сети))
- Aerolab
- Сообщения: 242
- Зарегистрирован: Чт фев 20, 2014 1:00 am
- Откуда: Воронеж
![]() rb338 » Вс авг 14, 2016 4:26 pm
rb338 » Вс авг 14, 2016 4:26 pm


Найти меня проще всего на D2: https://www.drive2.ru/r/mazda/323/455230250566025378/
-
rb338 - Сообщения: 4773
- Зарегистрирован: Вс июл 04, 2010 12:00 am
- Откуда: Санкт-Петербург
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 58